Kaiyuan Eric Chen
Kaiyuan Eric Chen
I am a PhD candidate in the Department of Computer Sciences at UC Berkeley, where I'm a member of the Berkeley Automation Lab (AUTOLab) and Berkeley Artificial Intelligence Research Lab (BAIR). My research is guided by Prof. John Kubiatowicz and Prof. Ken Goldberg.
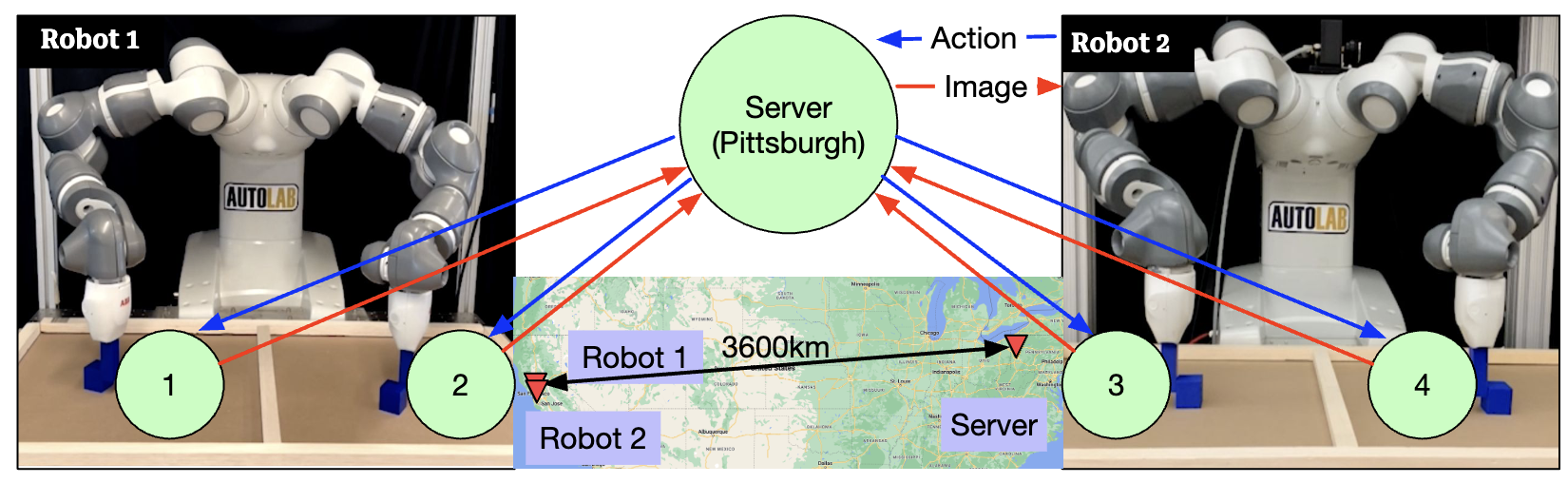
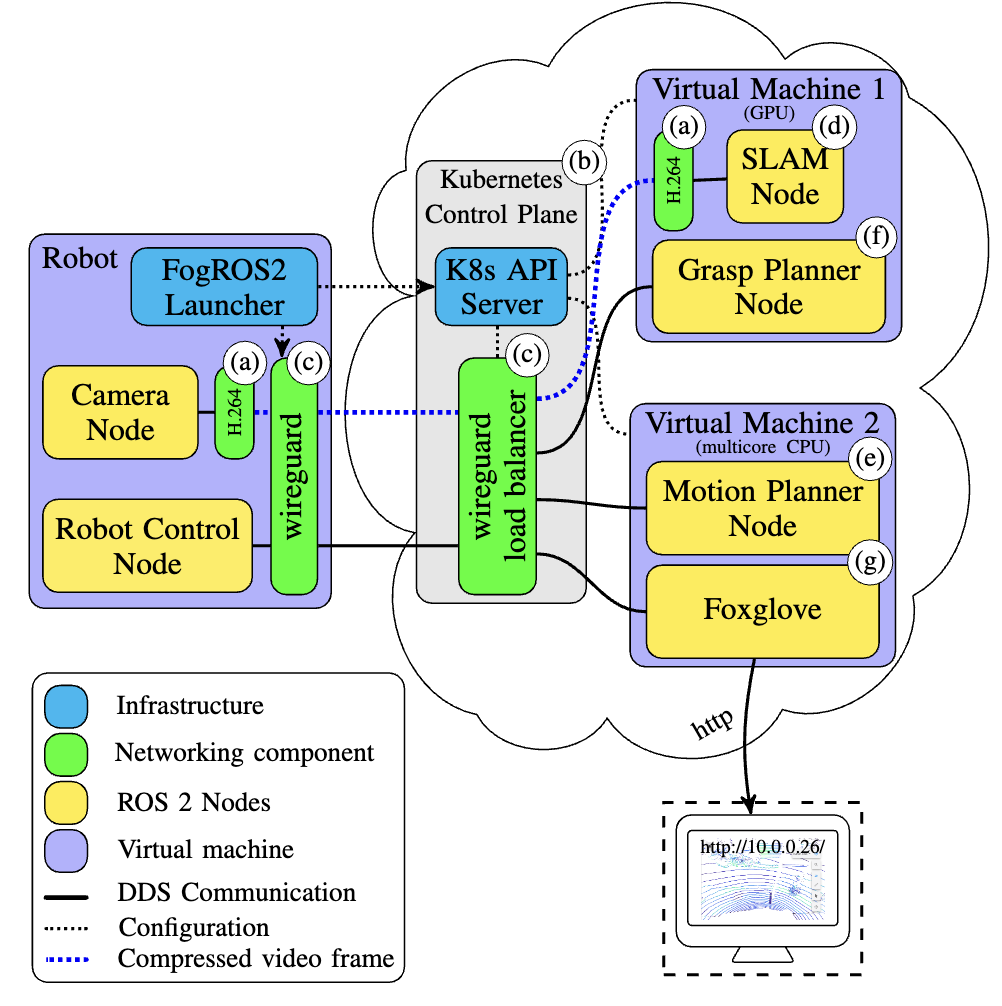
I lead the development of FogROS2, a state-of-the-art open-source cloud robotics framework that seamlessly offloads unmodified robotics applications to the cloud, enabling low-powered robots to use immensive computing resources. I am spearheading the AI development of SkyPilot (7.6k ⭐), a multi-cloud compute orchestration platform.
Prior to Berkeley, I earned my B.S. in Computer Science from UCLA in 2020, where I conducted research on Wireless Networking under the guidance of Prof. Songwu Lu.
Selected Publications
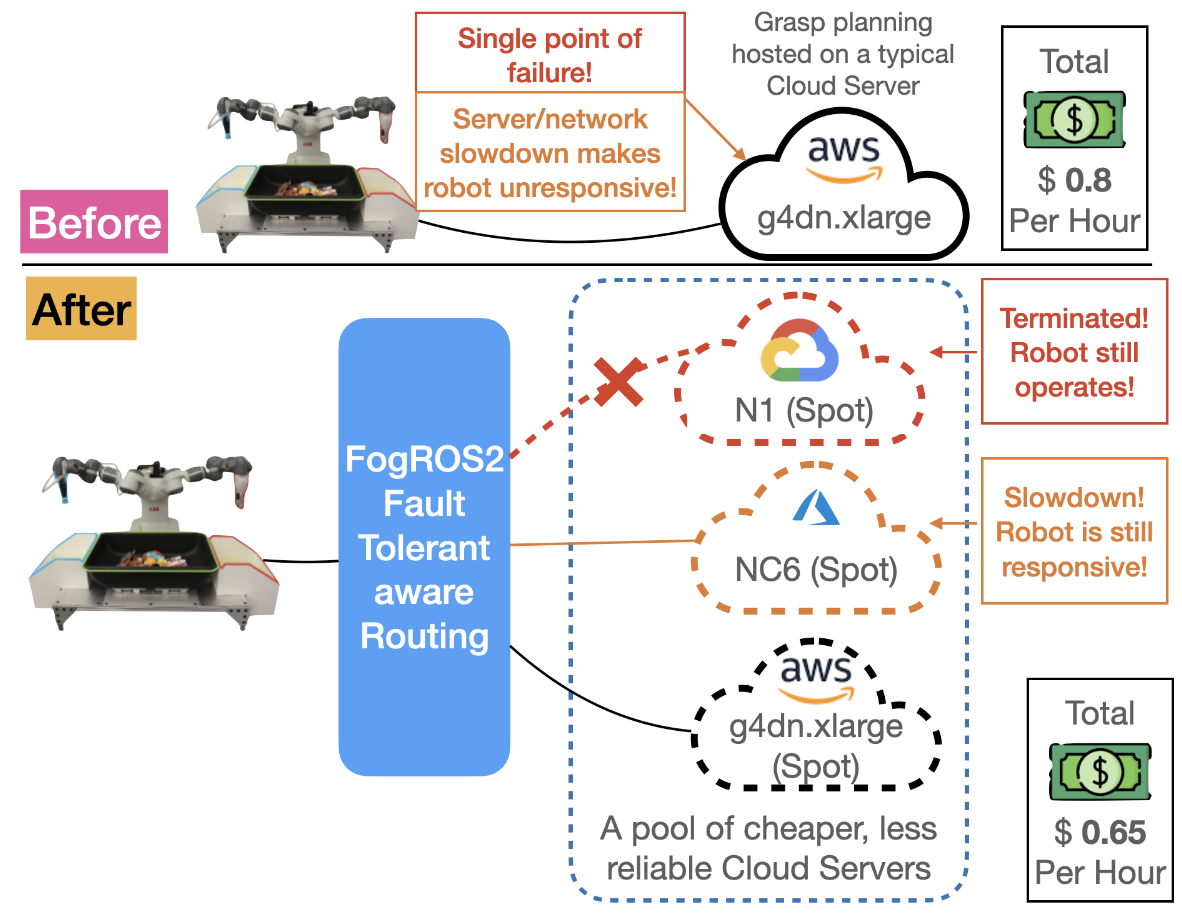
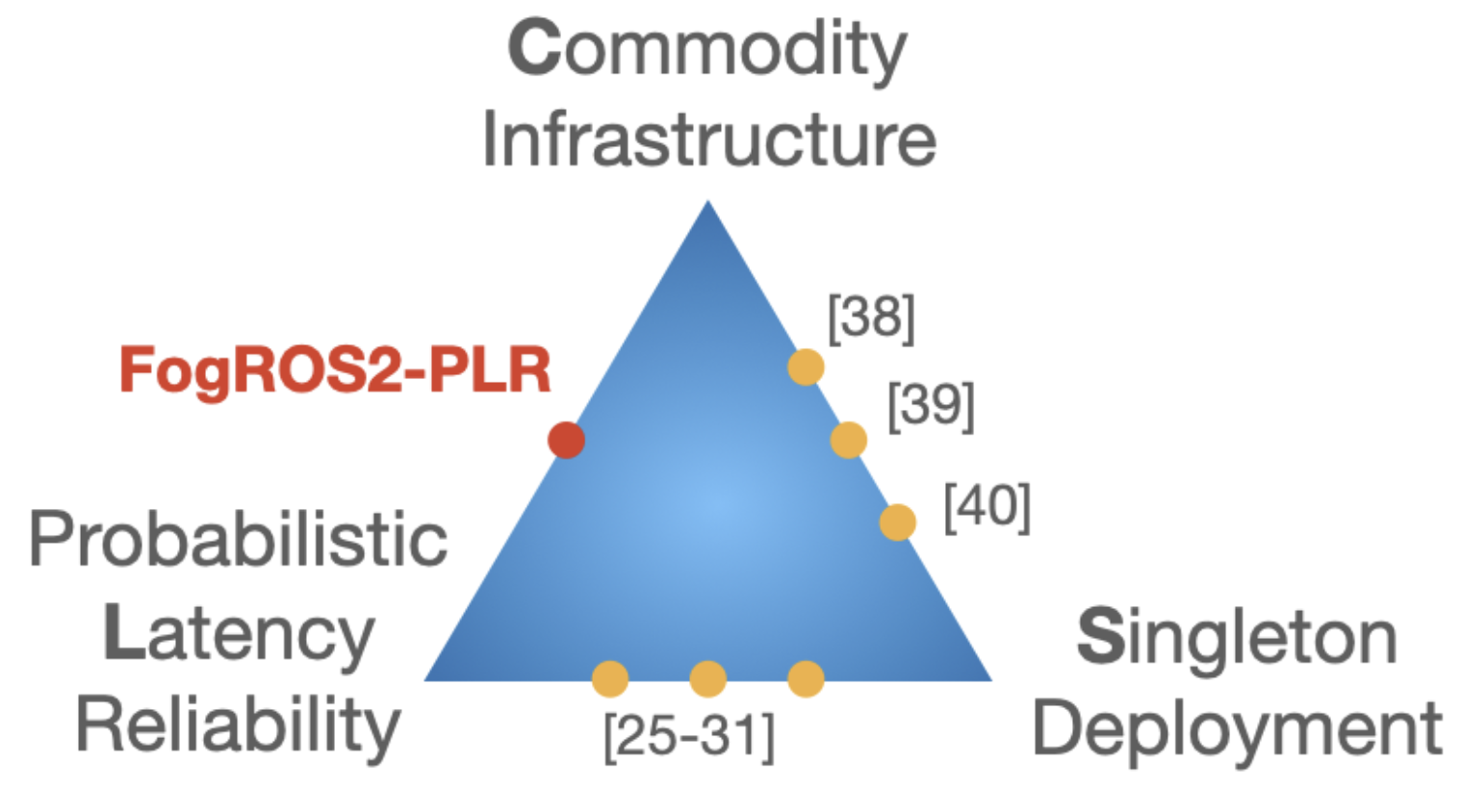
FogROS2-FT: Fault Tolerant Cloud Robotics BEST PAPER FINALIST
FogROS2: An Adaptive Platform for Cloud and Fog Robotics Using ROS 2 OFFICIAL ROS 2 RELEASE
SELECTED SERVICES
Leading Organizer for Workshop/Tutorial
Journal Reviewer for
- IEEE Journal on Selected Areas in Communications (IF 13.0)
- IEEE Internet of Things Journal (IF 9.9)
- IEEE Robotics and Automation Letters (RAL) (IF 4.6)
Conference Reviewer for
- 2025 IEEE/CVF International Conference on Computer Vision (ICCV)
- 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- 2025 IEEE 18th International Conference on Automation Science and Engineering (CASE)
- 2025 International Conference on Robotics and Automation (ICRA)
- 2024 IEEE RSJ International Conference on Intelligent Robots and Systems (IROS)
- 2024 IEEE 17th International Conference on Automation Science and Engineering (CASE)
- 2024 International Conference on Robotics and Automation (ICRA)
- 2023 International Conference on Robotics and Automation (ICRA)
- 2022 IEEE RSJ International Conference on Intelligent Robots and Systems (IROS)